Objectives
- Expand your horizons beyond WiFi communication
- Get started with the LoRa protocol
- Identify key features of LoRa
- Identifying programmable boards which support LoRa
- Blinking an LED on a programmable board using LoRa
Things
For this simple experiment, you will need
- Arduino Uno board (Quantity: 1 no)
- LoRa board (Quantity: 2 no)
- DHT11 (Quantity: 1 no)
- Project breadboard (Quantity: 2 no)
- Arduino IDE on your computer
Let’s begin!
LoRa or ‘Long Range’ is a wireless technology that has been developed to enable low data rate communications to be made over long distances by remote data sensors for Machine-2-Machine or IoT applications. Technically, it is a way of manipulating a radio wave to encode information from low data rate applications to transmit over a long range. It is a very efficient way to get good receiver sensitivity from less expensive chips. It operates on the unlicensed band which is 868Mhz in Europe and 915Mhz in the US.
Key Features
- Low cost
- Standardized
- Low power
- Long Range
- Secure
- High Capacity
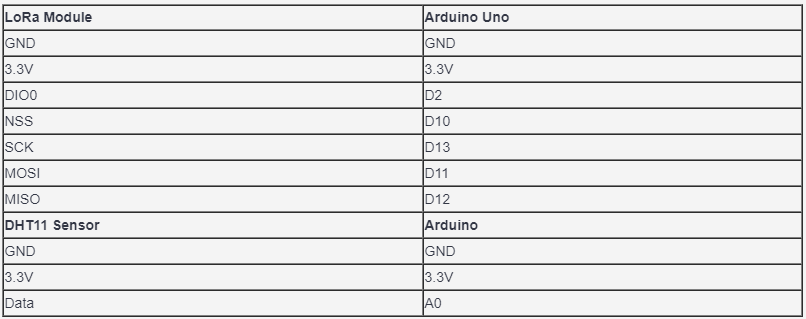
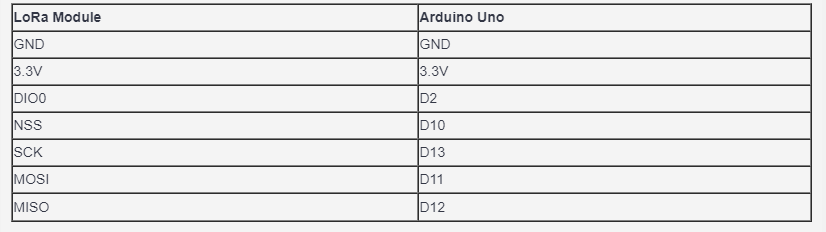
Circuit
Transmitter Lora
Receiver LoRa
Final Code
Before you upload the code to Arduino IDE, download this library zip file and add it to your Arduino IDE.
LoRa transmitter Code
#include <SPI.h>
#include <RH_RF95.h>
#define DHT11_PIN 0
char sensor_string[]="Humidity: 00 Temperature: 00";
// Singleton instance of the radio driver
RH_RF95 SX1278;
byte read_dht11_dat()
{
byte i = 0;
byte result = 0;
for(i=0;i<8;i++)
{
while(!(PINC&_BV(DHT11_PIN)));
delayMicroseconds(30);
if(PINC&_BV(DHT11_PIN))
result|=(1<<(7-i));
while((PINC&_BV(DHT11_PIN)));
}
return result;
}
void setup()
{
DDRC|=_BV(DHT11_PIN);
PORTC|=_BV(DHT11_PIN);
Serial.begin(9600);
while (!Serial) ; // Wait for serial port to be available
if (!SX1278.init())
Serial.println("Notice:init failed");
// Defaults init are 434.0MHz, 13dBm, Bw = 125 kHz, Cr = 4/5, Sf = 128chips/symbol, CRC on
}
void loop()
{
byte dht11_dat[5];
byte dht11_in;
char humstring[3];
char tmpstring[3];
//String humidi;
//String temper;
byte i;
PORTC &= ~_BV(DHT11_PIN);
delay(18);
PORTC|=_BV(DHT11_PIN);
delayMicroseconds(40);
DDRC &= ~_BV(DHT11_PIN);
delayMicroseconds(40);
dht11_in = PINC & _BV(DHT11_PIN);
delayMicroseconds(80);
dht11_in=PINC & _BV(DHT11_PIN);
delayMicroseconds(80);
int x=0;
for(x=0;x<5;x++)
dht11_dat[x]=read_dht11_dat();
DDRC|=_BV(DHT11_PIN);
PORTC|=_BV(DHT11_PIN);
byte dht11_check_sum = dht11_dat[0]+dht11_dat[1]+dht11_dat[2]+dht11_dat[3];
if(dht11_dat[4]!=dht11_check_sum)
{
Serial.println("DHT11 checksum error");
}
itoa(dht11_dat[0], humstring, 10);
itoa(dht11_dat[2], tmpstring, 10);
sensor_string[10] = humstring[0];
sensor_string[11] = humstring[1];
sensor_string[26] = tmpstring[0];
sensor_string[27] = tmpstring[1];
Serial.println("Sending to SX1278_server");
Serial.println(sensor_string);
// Send a message to SX1278_server
SX1278.send(sensor_string, sizeof(sensor_string));
Serial.println("mark0");
SX1278.waitPacketSent();
Serial.println("mark1");
// Now wait for a reply
uint8_t buf[RH_RF95_MAX_MESSAGE_LEN];
uint8_t len = sizeof(buf);
delay(1000);
Serial.println("mark2");
}LoRa receiver Code
#include <SPI.h>
#include <RH_RF95.h>
// Singleton instance of the radio driver
RH_RF95 SX1278;
int led = 9;
void setup()
{
pinMode(led, OUTPUT);
Serial.begin(9600);
while (!Serial) ; // Wait for serial port to be available
if (!SX1278.init())
Serial.println("init failed");
// Defaults init are 434.0MHz, 13dBm, Bw = 125 kHz, Cr = 4/5, Sf = 128chips/symbol, CRC on
}
void loop()
{
if (SX1278.available())
{
// Should be a message for us now
uint8_t buf[RH_RF95_MAX_MESSAGE_LEN];
uint8_t len = sizeof(buf);
if (SX1278.recv(buf, &len))
{
digitalWrite(led, HIGH);
//RH_RF95::printBuffer("request: ", buf, len);
Serial.print("Receive Message: ");
Serial.println((char*)buf);
//Serial.print("RSSI: ");
//Serial.println(SX1278.lastRssi(), DEC);
// Send a reply
digitalWrite(led, LOW);
}
else
{
Serial.println("recv failed");
}
}
}
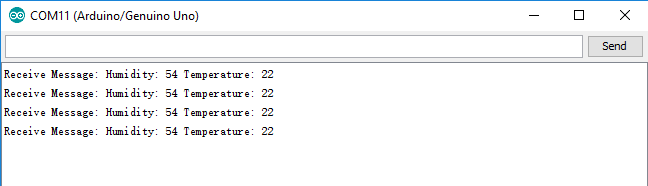
There you go!
After uploading the codes to both the Arduino boards, open the serial monitor of the receiver Arduino and you will see the following





No comments:
Post a Comment